1. Verskillende strukturele beginsels
Die ontwerpbeginsels van die twee modelle is verskillend, wat lei tot verskillende strukture om sinchronisasie aan beide kante van die buigskuif te verseker. Die torsie-as-buigmasjien gebruik 'n torsie-as om die linker- en regter-swaaistawe te verbind om 'n torsie-as te vorm wat 'n sinchronisasiemeganisme dwing om op en af te beweeg in die silinders aan beide kante, dus is die torsie-as sinchronisasie buigmasjien 'n meganiese gedwonge sinchronisasiemetode , en die parallelisme van die skuifbalk kan nie outomaties nagegaan word nie outomatiese bemiddeling.
Die elektro-hidrouliese sinchrone buigmasjien is om 'n magnetiese (optiese) skaal op die skuifbalk en die muurplaat te installeer. Die numeriese beheerstelsel kan die sinchronisasie van beide kante van die skuifbalk te eniger tyd deur die terugvoerinligting van die magnetiese (optiese) skaal ontleed. As daar 'n fout is, sal die numeriese beheerstelsel deur die proporsionele elektro-hidrouliese servoklep verstel om die slag aan beide kante van die skuif te sinchroniseer. Numeriese beheerstelsel, hidrouliese beheerklepgroep en magnetiese skaal vorm die terugvoer-geslotelusbeheer van die elektro-hidrouliese sinchrone buigmasjien.

2. Presisie
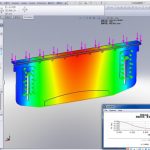
Die parallelisme van die skuifbalk bepaal die hoek van die werkstuk. Die torsie-as sinchroniese buigmasjien handhaaf meganies die sinchronisasie van die skuifbalk, sonder intydse foutterugvoer, en die masjien self kan nie outomatiese aanpassings maak nie. Boonop is sy gedeeltelike lasvermoë swak (die torsie-as sinchroniese buigmasjien gebruik die torsie-as om die sinchronisasiemeganisme te dwing om die silinders aan beide kante op en af te beweeg. As die langtermyn gedeeltelike las die torsie-as sal vervorm .), is die elektro-hidrouliese sinchrone buigmasjien 'n stelsel deur proporsionele elektriese. Die vloeistofklepgroep beheer die skuif-sinchronisasie, en die magnetiese (optiese) skaal verskaf intydse foutterugvoer. As daar 'n fout is, sal die stelsel deur die proporsionele klep aanpas om die sinchronisasie van die skuifbalk te handhaaf.
3. Spoed
Daar is twee punte in die werk van die masjien wat sy hardloopspoed bepaal: (1) skuifspoed, (2) agterwaartse spoed, (3) buigstap.
Die torsie-as sinchrone buigmasjien gebruik 'n 6:1 of 8:1 silinder, wat stadig is, terwyl die elektro-hidrouliese sinchrone buigmasjien 'n 13:1 of 15:1 silinder gebruik, wat vinnig is. Daarom is die vinnige afwaartse spoed en terugkeerspoed van die elektro-hidrouliese sinchroniese buigmasjien baie hoër as die sinchrone torsie-buigmasjien.
Wanneer die skuifbalk van die sinchroniese buigmasjien van die torsie-as afwaarts beweeg, alhoewel die spoed die funksies van vinnig af en stadiger het, is die vinnige af en terug spoed slegs 80 mm/s, en die vinnige en stadige skakeling is nie glad nie. Die loopspoed van die agtermaat is slegs 100 mm/s.
As die werkstuk in verskeie stappe gebuig moet word, moet elke proses van die torsie-as sinchrone buigmasjien afsonderlik ingestel word, en die verwerkingsproses is baie omslagtig. Die elektro-hidrouliese sinchrone masjien kan egter die proses van elke stap deur die rekenaar instel en stoor, en kan voortdurend bedryf word, wat die spoed van die buigstap aansienlik verbeter en die werkdoeltreffendheid verbeter.
Wanneer die skuifbalk van die elektro-hidrouliese sinchroniese buigmasjien afgaan, het die spoed die funksies van vinnig af en stadiger. Die vinnige af- en terugkeerspoed kan 200 mm/s bereik, en die vinnige en stadige omskakeling is glad, wat die produksiedoeltreffendheid aansienlik kan verbeter. Terselfdertyd bereik die hardloopspoed van die agtermaat 300 mm/s.
4. Krag
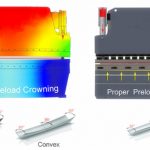
As gevolg van sy eie ontwerp kan die torsie-sinchroniese buigmasjien nie onder eksentrieke las buig nie. As dit vir 'n lang tyd onder eksentrieke las gebuig word, sal dit veroorsaak dat die wringas vervorm. Die elektro-hidrouliese sinchrone CNC-buigmasjien het nie so 'n probleem nie. Die Y1- en Y2-asse aan die linker- en regterkant werk onafhanklik, dus kan dit onder gedeeltelike lading gebuig word. Die werkdoeltreffendheid van 'n elektro-hidrouliese sinchrone buigmasjien kan gelykstaande wees aan twee tot drie torsie-as sinchrone buigmasjiene.
Verwante Produkte
 Die werkbeginsel en samestelling van CNC-drukrembuigmasjien
Die werkbeginsel en samestelling van CNC-drukrembuigmasjien- Waarom 'n vergoedingstelsel by 'n persrembuigmasjien voeg
- Vergelyking en seleksie van drukrem CNC-stelsels
- 4 stappe om die E21-stelsel van CNC-plaatmetaalbuiger te ken
- Hoe om defleksievergoeding te maak vir CNC-plaatmetaalbuiger
- Beste verkoop hidrouliese druk hidrouliese werkswinkel pers hidrouliese pers ton hidroulies
- China 40 ton drukrem
- Veilige werkingsreëls van hidrouliese kragpersmasjien
- WILA doeltreffende oplossing om medium en dik plate te buig
- Algemene meganiese foute en instandhouding van persrembuigmasjiene